Forskare från University of Illinois i Urbana-Champaign och Princeton University använde
Forskarna använde en liten spiralställdon som efterliknar musklernas arbete i klickbaggens bröstkorg. Ett konstgjort manöverdon drar i en liten stråle, vilket får roboten att långsamt böja sig och lagra elastisk energi. När den väl släppts trycker denna energi upp roboten.
I tidigare studier har forskare funnit detklickbaggen har en speciell spiralmuskel. Den lagrar energi och triggas till exempel när en insekt rullar på ryggen. Under verkan av en skarp uträtning av denna muskel, kastar skalbaggens kropp upp till en stor höjd, flera gånger dess storlek. Samma mekanism fungerar för robotar.
En av de största utmaningarna med småskalig robotik är att hitta en design som är liten men kraftfull nog att övervinna hinder eller snabbt lämna farliga platser.
Sameh Tawfiq, forskningschef
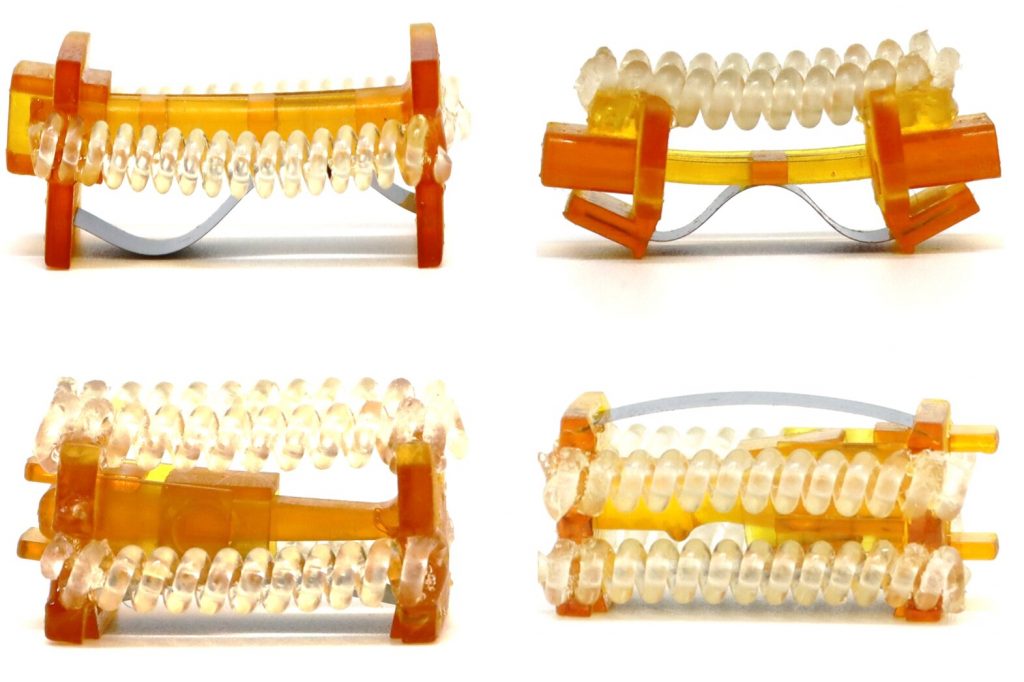 Varianter av design av hoppande robotar föreslagna av forskare. Bild: University of Illinois Urbana-Champaign
Varianter av design av hoppande robotar föreslagna av forskare. Bild: University of Illinois Urbana-Champaign
Forskare tror att små robotar kommer att göra detatt ta sig in på svåråtkomliga platser för att hjälpa till att utföra underhåll på stora maskiner som turbiner och jetmotorer, eller i jordbruket för att inspektera växter, som att ta bilder för att identifiera problem.
Läs mer:
En gigantisk solfläck vänder sig mot jorden. Det är synligt för blotta ögat
Se hur ett bladlöst plan flyger. Dess hastighet överstiger 900 km/h
Vintergatan är onormalt stor för sin galaktiska filament
På omslaget: en konstnärlig illustration av idén. Bild: Michael Vincent, University of Illinois Urbana-Champaign