Den inlärningsmetod som föreslås av robotiker gör att roboten självständigt kan lära sig att utföra simmanövrar.
”I vår studie presenterade vien biologisk förstärkningsinlärningskontrollmetod för att simulera rörelsen av undervattensrobotar”, säger Gang Chen, en av författarna till utvecklingen. "Denna metod är baserad på ett av våra tidigare arbeten om bäverrörelse, publicerat i Springer Links Journal of Intelligent & Robotsystem".
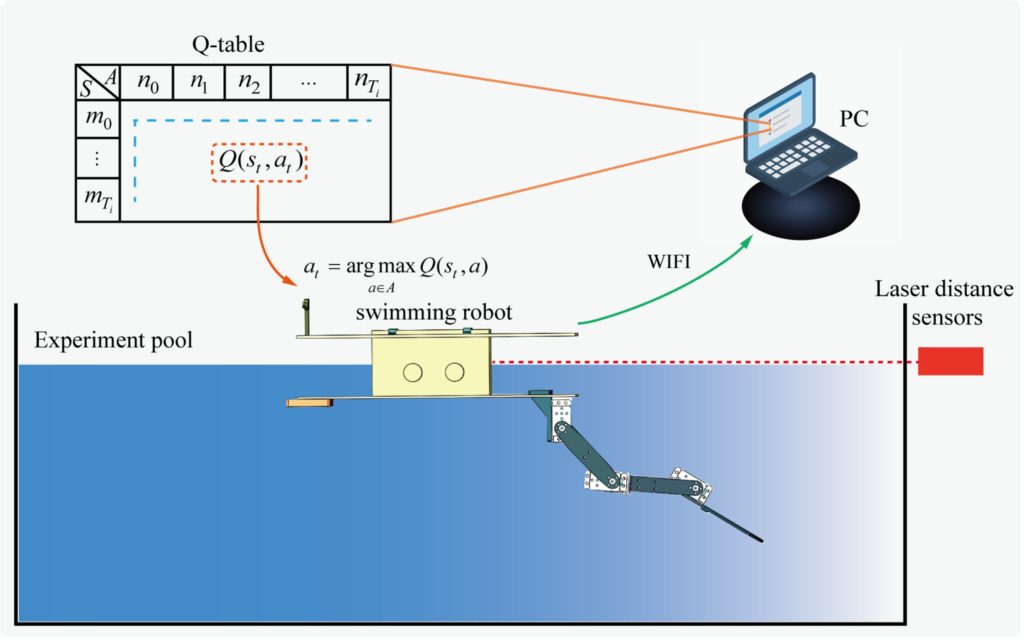 Principen för träningen av bäverroboten
Principen för träningen av bäverroboten
Undervattensrobotar som den som Chen och hans skapadekollegor är icke-linjära system, och deras rörelser involverar komplex hydrodynamik. Att noggrant modellera deras rörelse kan därför vara en mycket komplex uppgift som kräver betydande beräkningsresurser.
Till skillnad från andra ubåtskontrollmodellerRobotmetoden som utvecklats av Chen och kollegor kräver inte integration av komplexa rörelsemodeller baserade på vätskedynamik. Detta beror på att det bygger på en förenkling av idéerna om arbetet hos lederna som ansvarar för simning i bävrar. Detta gör det lättare att träna modellen och minskar även robotens ineffektiva rörelser under träning.
”Genom att kombinera förstärkningsinlärning medmekanismer som ligger till grund för bävrarnas simbeteende, implementerar vår metod robotkontroll över simning så snabbt och effektivt som möjligt”, förklarade Chen. "Den mest anmärkningsvärda fördelen är att den undviker att skapa komplexa rörelsekontrollmodeller och snabbt implementerar simkontrollen av en bäverliknande enbensrobot."
Läs mer
Amerikansk satellit "såg" ett ovanligt meddelande från jorden
Publicerad video från raketen, som avfyrades från en experimentell accelerator
Monstret i mitten av vår galax: titta på fotot av ett svart hål i Vintergatan