Professor Edward Anderson vid Massachusetts Institute of Technology och hans doktorand Sandra Liu
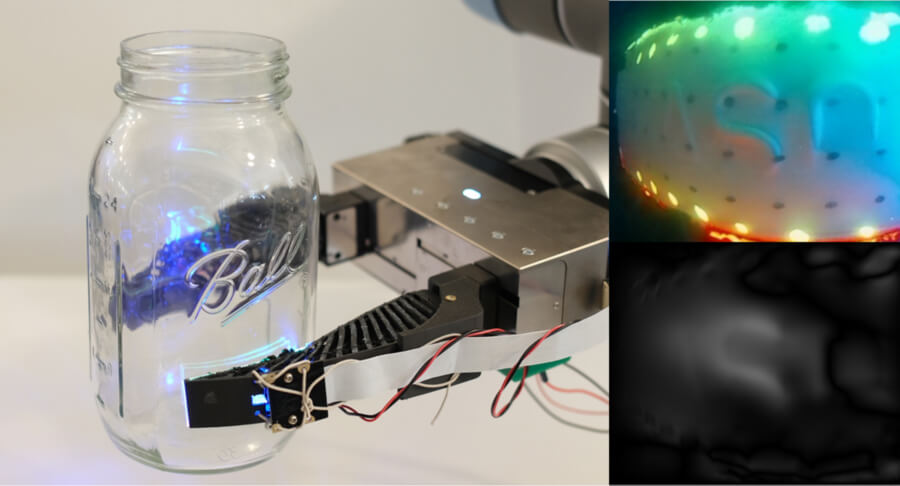
Greppet består av två flexibla räfflade fingrar,som anpassar sig till formen på föremålet de är i kontakt med. Dessa fingrar, som i många liknande utvecklingar, är gjorda av flexibla plastmaterial på en 3D-skrivare. Men i sin robot tog ingenjörerna bort de tvärgående ribborna på insidan av fingrarna och gav dem styvhet. Istället installerade forskarna en kamera och sensorer.
En tunn akrylskiva placeras på utsidan av kaviteten, på vilken "känsliga" silikongelkuddar fästs.I kavitetens djup placeras en kamera riktad mot akrylskiktet och hela hålrummet belyses av lysdioder.
När du rör vid ett föremål lindas fingret försiktigt runtdet smälter samman med objektets konturer. Kameran och speciella algoritmer analyserar förändringen i silikon- och akrylplåtar. Baserat på analysen bestämmer roboten objektets allmänna form, ytoregelbundenheter, objektets orientering i rymden och den kraft med vilken det är nödvändigt att komprimera objektet.
Forskarna testade sinafånga genom att bara få en av de två fingrarna att röra. Enheten de skapade manipulerade framgångsrikt olika föremål, till exempel en miniskruvmejsel, en jordgubbe i plast, en tub med färg och ett glas vin. Samtidigt, när man fångar jordgubbar, kunde den interna sensorn framgångsrikt upptäcka kornigheten på dess yta, och när man arbetade med en burk kunde den läsa det graverade namnet.
 Källa: MIT Computer Science and Artificial Intelligence Laboratory
Källa: MIT Computer Science and Artificial Intelligence Laboratory
Som författarna till verket noterar, glasföremålrepresenterar en utmaning för datorseendesensorer på grund av ljusbrytning. Taktila sensorer låter dig kringgå denna begränsning. När greppet lyfte glaset kände han skaftets orientering i rymden och kunde se till att glaset pekade uppåt innan han sänkte det till bordet.
Ingenjörer noterar att skapa ett hålrum inutifinger något störde stabiliteten i greppet. Forskare planerar att slutföra designen av sin enhet för att rätta till denna brist. Dessutom planerar de att utveckla ett trefingergrepp som till exempel kan plocka upp fruktbitar och utvärdera deras mognad.
Läs mer:
MIT skapar en stationär värmemotor som överträffar turbiner
Efter tio års arbete ifrågasatte forskare fysikstandardmodellen
Se hur soluppgången ser ut på Mars