Ingenjörer från Biotechnology Robotics and Design Laboratory vid Singapore University of Technology
Robotgripare med omprogrammerbar arbetsyta. Video: SUTD
Mjuka grepp är flexibla ochsuperelastiska material som gör att de säkert och säkert kan greppa ett bredare utbud av geometrier och manipulera ömtåliga föremål, konstaterar forskarna. Men samtidigt har traditionella mjuka enheter ett begränsat arbetsgrepp och är designade för att utföra högt specialiserade uppgifter.
Ingenjörer har utvecklat en mjuk enhet somövervinner dessa begränsningar för första gången. Den nya enheten använder multimodal aktivering, där arbetsytan med mjukt grepp snabbt kan modifieras för att tillgodose nyttolaster med olika krav på kontaktyta. För att uppnå detta använde ingenjörer variabla fingerformer, infällbara grepp och en expanderbar handflata.
Robotgripare med omprogrammerbar arbetsyta. Video: Snehal Jain et al., Soft Robotics
Robotgripare med omprogrammerbar arbetsyta. Video: Snehal Jain et al., Soft Robotics
I en serie experiment, forskarehar visat att den justerbara arbetsutrymmesgriparen kan hålla enskilda riskorn eller couscous med en radie på upp till 1,5 mm, eller plocka upp tunna föremål upp till 300 mikron tjocka, såsom visitkort eller pappersark. Samtidigt kan den hantera stora och tunga föremål, som att lyfta en melon, flytta flingslådor eller påsar som väger upp till 1,5 kg.
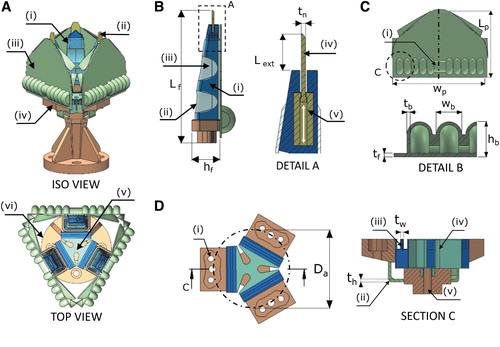 Infångningsenheten låter honom snabbt ändra konfigurationen av arbetsytan. Bild: Snehal Jain et al., Soft Robotics
Infångningsenheten låter honom snabbt ändra konfigurationen av arbetsytan. Bild: Snehal Jain et al., Soft Robotics
En enhets förmåga att ändras snabbtgör att den kan utföra ett stort antal uppgifter som annars skulle kräva många olika enheter. Utvecklarna noterar att enheten är användbar i livsmedelsindustrin, där det är nödvändigt att samtidigt arbeta med små livsmedelsprodukter och stora behållare.
Läs mer:
Den starkaste flamman av klass X inträffade på solen
"Anti-cancer svamp" stoppade spridningen av metastaser i 100% av fallen
Hemligheten med hållbarheten hos romersk betong avslöjas: den kan återställas