Vad är mjuka robotar?
Mjuk robotik är ett specialområde inom robotik som handlar om
Mjuk robotik beror till stor del påhur levande organismer rör sig och anpassar sig till sin miljö. Till skillnad från robotar som är byggda av styva material ger mjuka robotar ökad flexibilitet och anpassningsförmåga för att utföra uppgifter, samt ökad säkerhet när man arbetar med människor. Dessa egenskaper gör att den kan användas inom medicin och industri.
Mjuk robotik designar främstrobotar gjorda helt av mjuka material. Som ett resultat ser de resulterande robotarna ut som ryggradslösa djur som maskar eller bläckfiskar. Att simulera rörelsen för sådana robotar är en svår uppgift. Faktum är att för sådana processer är det nödvändigt att tillämpa metoderna för kontinuummekanik. Det är därför mjuka robotar ibland kallas kontinuerliga robotar.
Kontinuummekanik är en gren av mekanik, kontinuumfysik och kondenserade materiens fysik som ägnas åt rörelsen av gasformiga, flytande och deformerbara fasta ämnen, såväl som kraftinteraktioner i sådana kroppar.
Hybrider av mjuka och hårda robotar
För att studera biologiska fenomen skapar forskare mjuka robotar i bilden av levande organismer och utför experiment som är svåra att utföra på verkliga organismer.
Det finns dock styva robotar som också kan fortlöpande deformeras, till exempel ormroboten.
Mjuka konstruktioner kan användas som en del avstörre styv robot. Robotmjuka effektorer för att gripa och manipulera föremål ger en fördel. Poängen är att de inte förstör ömtåliga föremål.
Det är också möjligt att skapa hybrid mjuk-hårdrobotar som har en inre stel ram och externa mjuka element. Mjuka element kan ha många funktioner: både verkningsmekanismer som liknar djurmuskler och dämpande material för att säkerställa säkerheten vid kollision med människor.
 En robot med hjul med mjuka ben och förmågan att röra sig på marken.
En robot med hjul med mjuka ben och förmågan att röra sig på marken.
Foto: Ali Sadeghi, Alessio Mondini, Emanuela Del Dottore, Anand Kumar Mishra och Barbara Mazzolai
Mjuka robotar kan böjas till vilken form som helstform. De är gjorda av mycket mjukt material, inklusive nanomaterial. Detta gör dem mer som mänskliga kroppsdelar, såsom muskler. Man kan faktiskt säga att dessa robotar nästan vaknar till liv med hjälp av nanomaterial.
Trots mycket forskning inom området mjuka robotar är ingenjörer fortfarande i början av sin resa. Men experter förutspår att 2024 kommer deras marknad att nå 2,16 miljarder dollar.
Hur skiljer sig mjuka robotar från vanliga robotar?
Metallrobotar är mycket mer begränsade. De byggdes med hastighet och precision i åtanke, vilket gör dem idealiska för saker som monteringsband. Men de är inte så universella.
Mjuka robotar skiljer sig från industriella ellersamarbetsrobotar genom att deras konstruktion är gjord av mjuka, smidiga material. Deras design skiljer sig väldigt mycket från alla andra former av robotar, och på samma sätt utför mjuka robotar mycket olika funktioner.
De flesta mjuka robotar är fortfarande kvari de tidiga utvecklingsstadierna, och den allra första mjuka roboten utvecklades 2011 av Harvard-professor George Whitesides. Sedan dess har antalet och typerna av mjuka robotar ökat dramatiskt. Även om de kan vara flera år från deras faktiska kommersiella lönsamhet, representerar de fortfarande en spännande teknik med stor potential.
Mjuka robotar - en spännande innovation i världenrobotik. Ovanstående fem typer av mjuka robotar kan ha den största kommersiella potentialen för alla typer av mjuka robotar som för närvarande utvecklas.
Till skillnad från industriella eller samarbetsrobotar, har mjuka robotar många olika applikationer.
Hur används mjuka robotar?
Mjuka robotars överklagande ligger i deras flexibilitet och mångsidighet.
6 lovande typer av mjuka robotar
Det finns många olika typer av mjuka robotar, men det finns 6 olika applikationer som lovar den största kommersiella potentialen.
- Robotmuskler: flera typer utvecklas för närvarandemjuka robotar som kommer att fungera som robotmuskler. En av de mest lovande prototyperna hämtar inspiration från origami. Dess vikta struktur kan lyfta 1 000 gånger sin egen vikt och skalar från några millimeter till en meter i längd.Dessutom arbetar forskare nu med att skapa robotar i nanoskala från DNA.
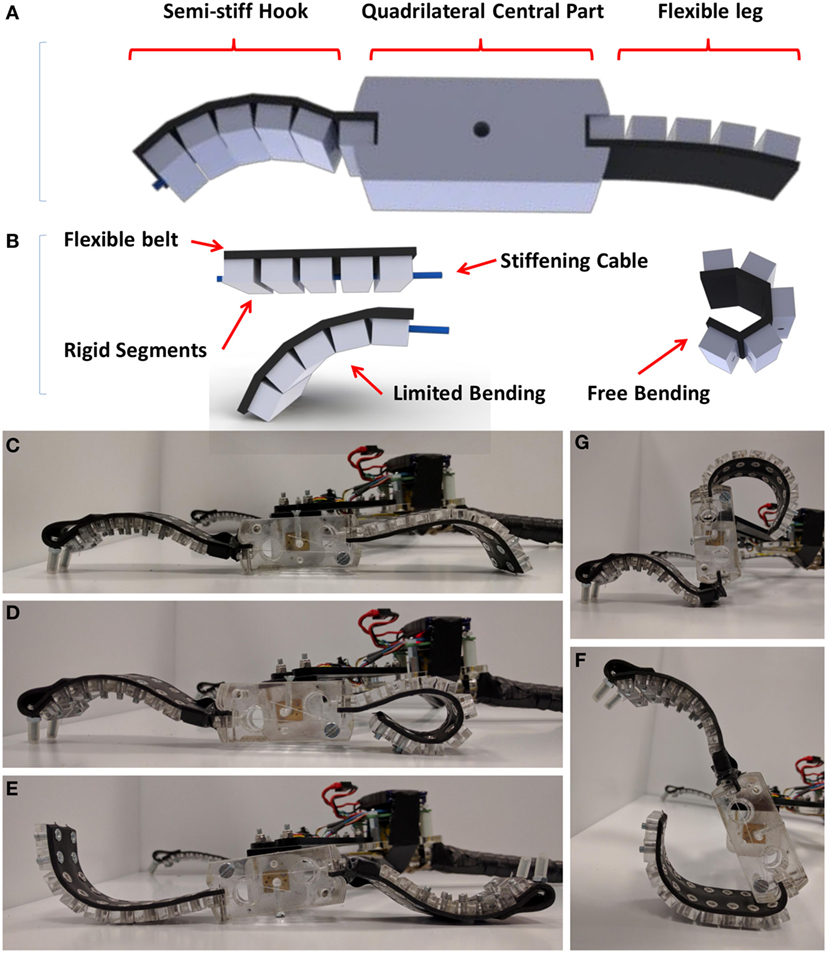
- Klätterrobotar:dessa typer av robotar har många potentialapplikationer som sträcker sig från byggnadskontroll och underhåll till sök- och räddningsoperationer. En version av de mjuka klättringsrobotarna har en böjd design som mycket liknar en larv. Detta gör att han kan krypa upp och ner i strukturer av olika storlek.
- Ätbara robotar. Det första projektet med sådana robotar skapat av skollaget i Philadelphia för den årliga Soft Robotics-tävlingen. Dessa biologiskt nedbrytbara robotar kan säkert leverera läkemedel till olika delar av kroppen.
- Bärbara robotar.Dessa biomimetiska enheter kan hjälpa tillen patient som genomgår fysisk rehabilitering. Den mjuka roboten efterliknar kroppens naturliga rörelse varhelst den är och hjälper patienten att återfå normal motorfunktion.
- Protesrobotar.Mjuka robotar kan användas för att skapaöverlägsna proteser för personer som saknar lemmar eller kroppsdelar. Ofta används mjuk robotteknik i slutet av en handprotes för att känsligare och mer exakt greppa föremål.
- Astronautrobotar. NASA-forskare föreslår att de en dag kommer att flyga på Mars yta. Andra designar redan robotar som kommer att fungera i de delar av människokroppen som är svårast att nå.
Även om mjuka robotar också kan användas iindustriella miljöer - särskilt som samarbetsrobotar (även kända som "cobots") som arbetar med människor, är de knappast begränsade till det.
Världens första mjuka autonoma robot
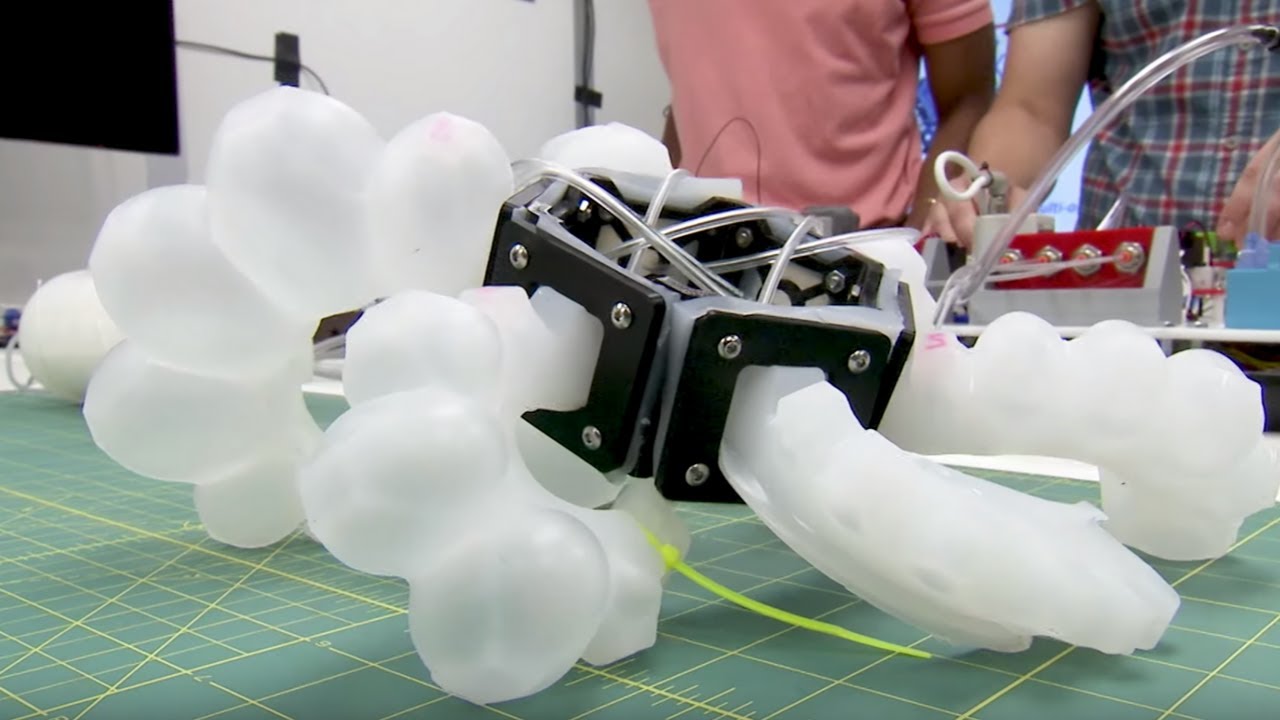
Under 2016 använde forskare från Harvardflytande silikongummi för utvecklingen av Octobot, världens första mjuka autonoma robot. Inspirerade av bläckfiskar kan dessa mjuka robotar snurra och övervinna hinder som kanske inte är möjliga för vassa, stela metallrobotar som de som avbildas i "The Terminator" eller "Star Wars".
Överraskande nog är Octobot billigare att tillverka,än en latte, och det kostar bara 5 cent att fylla på den. Man kan föreställa sig hundratals billiga mjuka robotar skickas för att undersöka platsen, övervinna hinder och flaskhalsar för att hjälpa till i räddningsoperationen.
”Huvudmålet med mjuk robotik är inte att skapaultraprecisa maskiner, eftersom vi redan har dem '', sa biomedicinsk ingenjör Jada Gerboni i sitt TED-samtal 2018. "Och att göra robotar klara av oväntade situationer i den verkliga världen."
Mjuka robotar inom medicin
Mjuka robotar kan användas somkirurgiska och medicinska instrument (särskilt endoskop). Deras fördel är att de rör sig lättare genom kroppsstrukturer än traditionella instrument. Detta ger läkare en tydligare bild av det område av patientens kropp som de vill undersöka.
Helt mjuka robotkläder som kan hjälpa människor att röra sig är ett steg närmare verkligheten med utvecklingen av ett nytt flexibelt och lätt kraftsystem för mjuk robotik.
Upptäckt gjord av ett team från BristolUniversitet, skulle kunna bana väg för bärbara hjälpmedel för personer med funktionshinder och de som lider av åldersrelaterad muskeldegeneration. Studien publicerades idag iScience Robotics.
 Ny smal och lätt pump med kreditkortsstorlek. Upphovsman: Tim Helps, University of Bristol.
Ny smal och lätt pump med kreditkortsstorlek. Upphovsman: Tim Helps, University of Bristol.
Mjuka robotar är gjorda av smidigt material,som kan sträcka och vrida. Dessa material kan användas för att göra konstgjorda muskler som dras samman när luft pumpas in i dem. Mjukheten i dessa muskler gör det möjligt att använda stödjande kläder. Men fram till nu har dessa pneumatiska konstgjorda muskler drivits av konventionella elektromagnetiska (motordrivna) pumpar, som är skrymmande, bullriga, komplexa och dyra.
Forskare vid Bristol SoftLaboch Bristol Robotics Laboratory, ledd av Robotics Professor Jonathan Rossiter, har framgångsrikt demonstrerat en ny elektro-pneumatisk pump som är mjuk, flexibel, billig och lätt att tillverka.
I artikeln beskriver teamet hur den nya mjukaEn kreditkortsstorlek kan driva konstgjorda muskler med luftblåsan och pumpvätskor. Teamet beskriver också sina nästa steg för att göra kraftfulla kläder till verklighet.
Likaså kolbaserade titanpolymererkan användas i kombination med syntetiska polymerer för att skapa ultratunna konstgjorda muskler. Denna teknik har visats i reproduktioner av dansande fjärilar, fladdrande löv och blommande blommor vid Korea Advanced Institute of Science and Technology.
Hur fungerar mjuka robotar?
Mjuka robotar speciellt designade förlivets imitationer, måste ofta utsättas för cyklisk stress när man rör sig eller utför någon annan uppgift. Till exempel, i fallet med lamprör eller bläckfiskliknande robot som beskrivs ovan, skulle det kräva elektrolys av vatten och antändning av gas för att röra sig, vilket resulterar i snabb expansion för att driva roboten framåt. Denna repetitiva och explosiva expansion och sammandragning kommer att skapa en intensiv cyklisk belastning på det valda polymermaterialet. En robot under vattnet i Europa skulle vara nästan omöjlig att reparera eller byta ut, så man måste vara noga med att välja ett material och en design som minimerar förekomsten och utbredningen av utmattningssprickor. I synnerhet bör ett material väljas med en uthållighetsgräns eller en spänningsamplitudfrekvens över vilken utmattningskarakteristiken för polymeren inte längre är beroende av frekvensen.
Eftersom mjuka robotar är gjorda av mjukamaterial måste temperatureffekter beaktas. Flödesspänningen för ett material tenderar att minska med temperaturen, och i polymera material är denna effekt ännu mer uttalad. Vid rum och högre temperaturer kan långa kedjor i många polymerer sträcka sig och glida längs varandra, vilket förhindrar lokal spänningskoncentration i ett område och gör materialet plast. Men de flesta polymerer genomgår en duktil till spröd övergångstemperatur under vilken det inte finns tillräckligt med termisk energi för att långa kedjor ska reagera på detta duktila sätt, och destruktion är mycket mer troligt. Tendensen för att polymera material blir spröda vid lägre temperaturer antas vara orsaken till Challenger-skyttelkatastrofen och bör tas mycket på allvar, särskilt för mjuka robotar som kommer att introduceras i medicin. Övergångstemperaturen för duktil till spröd behöver inte vara vad som kan betraktas som "kall" och är i själva verket en egenskap hos själva materialet, beroende på dess kristallinitet, seghet, sidogruppstorlek (i fallet med polymerer) och andra faktorer.
Nackdelar med teknik
Mjuka robotar är inte utan sina nackdelar.Specifikt upptäckte forskarna att vätskemanöverdon - enheterna som faktiskt animerar robotar - är långsamma att slå på på grund av den stora mängd vätska som krävs för rörelse, eller för att deras flöde bromsas av olika strukturer i enheten (som rör och ventiler) ). .
Men Harvard-forskare utvecklasjobba runt. Observera att böjningen av sådana leksaker släpper ut mycket energi, de utformar ställdon med två utdragbara lock, det ena i det andra. När det yttre locket är uppblåst ökar trycket på det inre locket. När den böjs sätter frigöringen av energi enheten i rörelse.
Mjuka robotar har potentialsträcker sig till Mars och tillbaka, och de kommer utan tvekan att bli en stor del av samhället de närmaste åren. Deras förmåga begränsas endast av den mänskliga fantasin.
Mjuka robotar och människor
Mjuka kroppsrobotar erbjuder möjligheten tillsociala och taktila interaktioner mellan människor och robotar, som kräver noggrann övervägande av möjligheten till olämpliga känslomässiga anknytningar och personligt och socialt destruktivt beteende hos användare. Etiska frågor relaterade till interaktion mellan människa och robot och hur de ska bidra till utformningen av mjuk robotik i samband med social interaktion diskuteras i en artikel för tidskriften Soft Robotics.
Thomas Arnold och Matthias Schoitz, Tufts University,Medford, Massachusetts, var medförfattare till en artikel med titeln "The Tactile Ethics of Soft Robotics: Intelligent Design for Human-Robot Interaction." De utforskar ett brett spektrum av ämnen, inklusive mjuka roboters förmåga att beröra och interagera med sin miljö, de potentiella riskerna med att bilda envägs mänskliga emotionella kontakter med robotar och vad sociala robotar ska utformas för. För att illustrera några av de etiska frågorna i samband med mjuk robotik och de potentiella riskerna för samhället diskuterar författarna exemplet med sexrobotar.
Arnold och Schoitz föreslår tre vanligaprincipen om att utveckla mjuk robotik i samband med en social person och en robot. De uppmuntrar den mjuka robotikgemenskapen att ta itu med dessa etiska frågor som ett sätt att förbättra kvaliteten och effektiviteten i interaktion mellan människa och robot. ”Mjuk robotteknik kommer snart att ge oss maskiner som direkt interagerar med människor; det är viktigt att vi börjar tänka på vilken inverkan de kan ha på sociala situationer. Denna uppsats beskriver några av de största utmaningarna och ger utmärkt vägledning för seriös diskussion om förhållandet mellan människa och robot, avslutar Barry A. Trimmer, doktor, som driver laboratoriet för neuromekanik och biomimetiska enheter vid Tufts University i Medford, Massachusetts .
Läs också
Den första exakta världskartan skapades. Vad är fel med alla andra?
Titta på Hubble-bilder av planetnebulosor.
Fysiker har skapat en analog av ett svart hål och bekräftat Hawkings teori. Vart leder det?