Vilka är robotar?
För några år sedan dök en cool sak upp på Reddit - forskare beskrev komplex
Robotik är en synergistisk tillämpadverksamhetsområde. Den består av programmering, mekatronik och cybernetik. Mekatronik är något som interagerar med den verkliga världen. Och cybernetik är en vetenskap med flera länkar, som först och främst inkluderar hanteringen av skapade program.
Vad är en robot?För 15 år sedan skulle många ha sagt att det här är en robotarm som arbetar i en fabrik och svetsar eller målar. Ett annat populärt svar är androidroboten från filmvärlden. Men är en rörlig vagn eller ett obemannat fordon en robot? Ja, detta är också ett av robotteknikens områden. Flygplan är också robotar, några av de senaste utvecklingarna inkluderar intelligent teknik och är i själva verket autonoma robotar.
 Mobilvagnen är också en robot
Mobilvagnen är också en robot
Det finns också ett sådant område inom robotik som fältrobotik - "mobil robotik". Detta inkluderar alla robotar som rör sig på ett fält, en byggnad eller under vattnet. Den mest intressanta tillämpningen, enligt min mening, är jordbruket.
Flygplanets historia
Flygplanens historia började i det förflutnaårhundrade. Innan dess flög bara ballonger utan motor, och det var svårt att kalla dem robotar. I början av förra seklet fungerade två typer av flygplan - luftskepp och flygplan. Den första kontrollerade flygningen gjordes av bröderna Wright. Dessutom dök den första autopiloten upp ganska snabbt, nästan 10 år efter det bidrog den till att stabilisera flygningen.
Den nuvarande riktningen för robotik är relaterad tillutveckling och tillgänglighet av nya öppna autopiloter som PixHawk (PixHawk är öppen hårdvara för kontroller, drönare och andra UAV:er. Den används för akademiska, amatör- och professionella ändamål). Ett exempel på drönares ankomst i varje persons liv är leveransen av pizza av företaget Dodo Pizza tillsammans med Copt Express - detta hände 2014.
 Flygplanets historia
Flygplanets historia
Hur drönaren styrs
Moderna flygplan använder enav de tre principerna för att skapa lyft - aerostatisk, jet eller aerodynamisk. Den aerodynamiska principen för flygning och skapandet av lyft (att kasta ner en del av luften) kan implementeras antingen på grund av rörelsen av hela apparaten, utrustad med en fast lageryta (vinge), eller på grund av rörelsen av enskilda lagerdelar av apparaten (huvudrotor, fläkt) i förhållande till luften.
 Hur enheter flyger
Hur enheter flyger
Drönaren har en propeller som skapar lyft.Efter att ha kommit från marken börjar enheten flytta propellern snabbare och stiger upp. Men handlingskraften är lika med reaktionens kraft. När propellern roterar skapas ett moment i motsatt riktning - detta är designen av helikoptrar och coptrar. Om helikoptern har en propeller blir den inte stabil. Därför använder enheten antingen ett tvårotorschema eller en svansrotor.
Quadcoptern har en mycket enkel design -den har vanligtvis fyra skruvar, varav två roterar åt ena hållet och två åt andra hållet. Om användaren behöver gå framåt går vissa propellrar långsammare medan andra går snabbare. Och om användaren vill vända, accelererar vissa skruvar diagonalt, medan andra saktar ner.
 Hur en quadcopter flyger
Hur en quadcopter flyger
Copterns rörelser i hörnen är relaterade till rörelsen längskoordinater. Om piloten vill gå framåt måste vi först luta drönaren framåt och sedan, när den elektriska enheten drar framåt, stabilisera den vid den punkt där vi vill stanna.
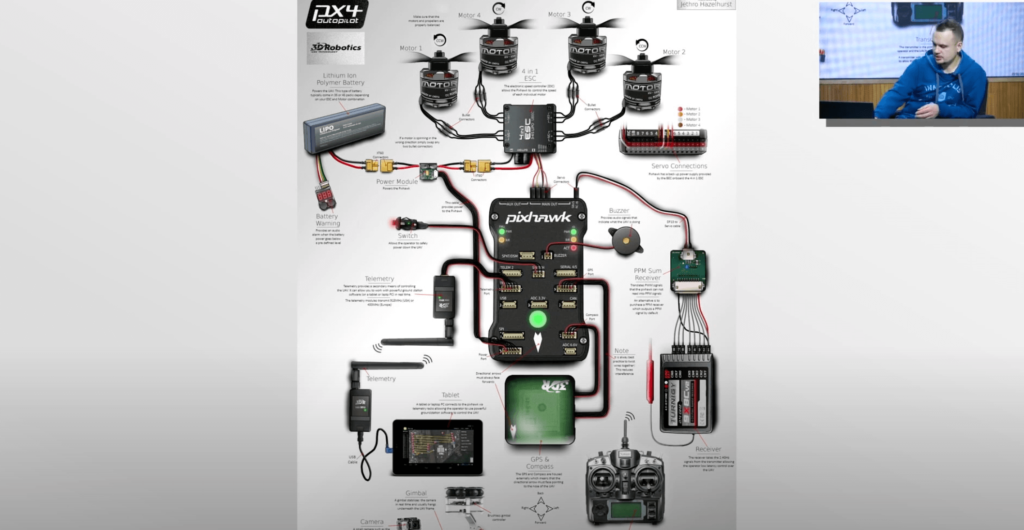
Detta är ett diagram över en av de mest populära autopiloterna,på grundval av vilka nya anordningar kan tillverkas. Den ansluter till alla motorer och sensorer. Dessutom har motorerna sin egen styrenhet, ESC-regulatorn - Electronic SpeedController, som styr motorns hastighet.
Av sensorerna finns GPS så att drönaren kanarbeta utomhus, flyg till poäng och stabilisera positionen. Men inne i själva autopiloten finns också en IMU - en tröghetssensormodul som gör att den kan bestämma attitydvinklar. Det finns även en kommunikationskanal, en markkontrollstation och ett batteri.
 UAV-enhet
UAV-enhet
Som nämnts ovan finns det en nivåmotorstyrning - vi kan utan att tveka ställa in varvtalet. Resten av nivåerna fungerar på samma princip: nästa är orienteringskontroll.
Men först måste vi kontrollera rotationshastigheten- FPV-koptrar flyger på den här nivån (enheter som låter dig se bilden från drönarens kamera i realtid från första person (FPV - First Person View). Erfarna piloter ställer in rotationshastigheten och styr hela tiden med joysticken. Nästa steg är när användaren kan stabilisera vinkeln, men drönaren kommer fortfarande att röra sig. Nästa är hastighetskontroll, och den högsta är positionskontroll, manövrar för att flytta till en punkt eller förflytta sig längs en given bana.
De som vill programmera, bygga ochstyr drönare - bör vara uppmärksam på PIX4 open source autopiloten. Det finns en hel gemenskap kring flygrobotik (ROS – robotic operating system, eller Open robotics), det finns simulatorer för drönare. Därför kan många experiment göras i simulatorn utan att ha själva drönaren.
Utvecklingsstadier för drönare
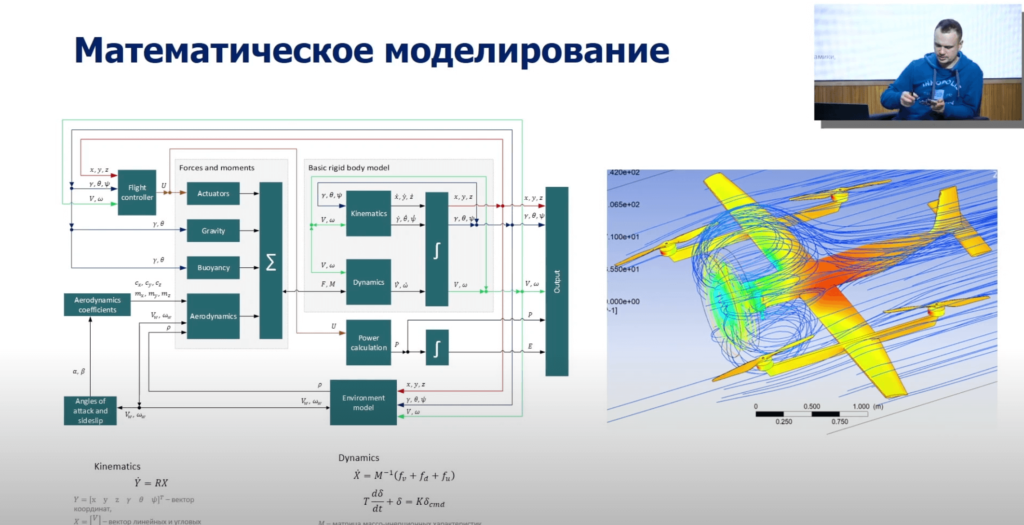
Forskare börjar med en konceptuellmodellering, och sedan måste de bygga en exakt modell av apparaten. Utan att gå in på formeln är en coptermodell i huvudsak en stel kroppsmodell. Detta är Newtons andra lag som utvidgas till att omfatta system av partiklar. Den har translations- och rotationsrörelse, det finns kinematik och rörelsedynamik, och för att beskriva modellen för en specifik enhet måste vi här lägga till ekvationen av krafter som verkar på en specifik drönare.
 Hur UAV modelleras
Hur UAV modelleras
Nästa steg är att utveckla systemetförvaltning. Om vi går på det klassiska sättet: först tar vi reda på den exakta matematiska modellen och på grundval av den syntetiserar vi redan kontrollalgoritmen eller nya formler. Alla nivåer kan ingå i styrsystemet: rörelseplanering, miljöuppfattning, tillståndsuppskattning med hjälp av sensorer. Algoritmer tillåter oss att förfina våra koordinater och data.
 Drönarkontrollsystem
Drönarkontrollsystem
När det finns en kontrollalgoritm kan det vara omedelbarttillämpa, men det är ganska dyrt. Enheter kraschar vid minsta fel - detta måste beaktas och säkerhetskopior göras. Simulatorer används för testning.
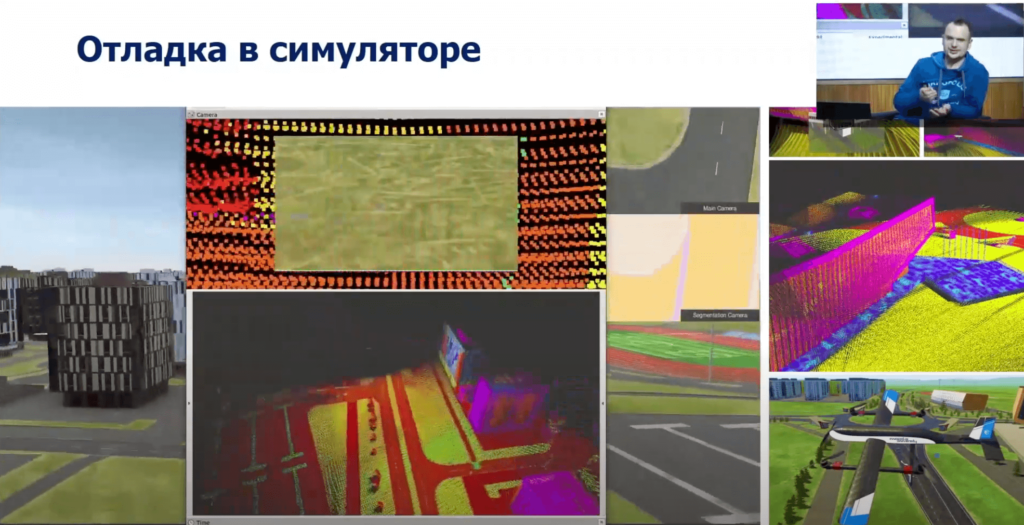
Nedan är en virtuell rundtur i Innopolisär en produkt från vårt universitet, den är tillgänglig för nedladdning på GitHub. Detta är inte bara en visuell komponent, utan också data från alla sensorer på enheten. Den har alla positionssensorer, den styrs som en drönare och kan felsöka alla kontrollalgoritmer.
 Hur drönare lär sig i simulering
Hur drönare lär sig i simulering
När baserat på erfarenhet med simulatorn visasmer självförtroende - du kan gå vidare till hårdvaruimplementering. Dess komponenter visas här: tillverkningen av enheten från kol och komposit, skapandet av elektronik, placeringen av motorer, deras fastsättning.
Tester startar inte på gatan:Först testas enheterna på en upphängning eller ett speciellt stativ. De kan användas för att felsöka delar av funktionen hos ett obemannat luftfartyg. Till exempel visas ett vertikalt start- och landningsflygplan här - det här är en hybrid av en copter och ett flygplan i videon kan du se hur det klarar av yttre störningar och bibehåller en vinkel. Till höger finns ett ganska galet experiment där du tänder fem motorer samtidigt och ser hur styrsystemet hanterar det.
 Hur drönare byggs
Hur drönare byggs
Efter testning går de vidare till flygningar -små starter i låga hastigheter, kontrollerad rörelse med en pilot som kan ta kontrollen. Slutackordet är en helt obemannad flygning.
Enheten lyfter vertikalt -"som en copter", sedan slås dess huvudmotor på, drönaren accelererar, växlar till flygplansläge och utvecklar tillräcklig hastighet för att vingen ska fungera. Sedan stängs konturpropellrarna av, och den flyger som ett flygplan - landningsprocessen utförs i omvänd ordning.
Vad händer med drönare
En av de uppgifter som modernforskare — kringgå hinder under flygning. Vissa drönare vet redan hur man gör detta, men uppgiften är lite bredare - du måste lära enheterna att röra sig så snabbt som möjligt i en miljö med hinder. Och det finns fortfarande utrymme att sträva efter och förbättra algoritmerna.
Ett annat exempel på sådan testning är en flygning tillskog. Det finns ett mycket intressant tillvägagångssätt - inte bara nya algoritmer används här, utan även sensorer - en händelsekamera. Detta är en mycket högfrekvent kamera som överför skillnaden mellan bildrutor i varje tidsenhet: detta gör att du snabbt kan kontrollera och reagera på hinder.
Inom området för drönarrörelseplanering,konkurrens: vem gör det snabbare. Uppgiften är att kartlägga ett okänt område, bygga dess tredimensionella representation, hitta föremål på det. Vi flög på universitetet, men löste också problemet med att hitta föremål. Våra resultat var till och med bättre än kända publicerade algoritmer.
Det finns tävlingar i loppet av drönare.De är gjorda på enheter med en kamera, när piloten har skyddsglasögon och styr drönaren för att flyga genom porten så snabbt som möjligt. En ganska spektakulär händelse, där samma uppgift måste utföras i automatiskt läge. Tyvärr har datorn hittills lyckats besegra en person endast i schack, och drönarroboten har inte kunnat köra om en mänsklig pilot, även om framstegen redan är ganska allvarliga. En drönare med hjälp av en maskinseendealgoritm kan utföra sådana uppgifter, arbetet är bara att öka hastigheten.
En annan tävling är Microsoft Games ofdrönare, det utförs i en simulator. En av de berömda ledande tävlingarna i Saudiarabien hålls i samma område. Deltagare där rekryteras tre år i förväg.
Obemannade enheter används för drönarshower– Det är spektakulära evenemang som idag har blivit en ersättning för fyrverkerier. Men det är inte den enda gruppanvändningen - de kan inspektera ett större område.
Där tillämpligt
Så att det inte ser ut som enbart vetenskapligtutveckling, nedan är en demo av Skydio-drönaren. Nu är detta den mest avancerade enheten när det gäller autonomi. Detta är ett exempel på hur modern teknik - kartografi, undvikande av hinder, trafikplanering används tillsammans i en produkt som redan är tillgänglig för användaren.
En annan riktning är ny designflygplan. En av dem är hopfällbara drönare. En sådan enhet kan flyga in i trånga utrymmen för inspektion efter en olycka. Ett annat exempel är en drönare som kan veckla ut sig. Han kan till exempel flyga ut ur ett smalt pneumatiskt rör och sedan flyga som vanligt.
Vi har också ett projekt på det här området - det här ärmjuk Tensodrone. Detta är den första soft-shell drönaren som flyger. Nöjet är att du kan tappa den och den förblir intakt. Dessutom kan du ändra längden på balkarna, spänningen på kablarna.
Två exempel som kommer att få liv isnart. Först, leverans via drönare. Nu finns det en mycket intressant implementering där vi kombinerar en paketterminal och en drönarlandningsstation - i det här fallet behöver vi inte oroa oss för när drönaren kommer, var den kommer att landa, så att vi kan komma till den på tid och hämta lasten innan den blir stulen. Det andra exemplet är en flygande taxi. Detta är det mest spännande utvecklingsområdet, och det finns redan fungerande prototyper. Men detta kommer att hända först under det kommande decenniet.
Vilken utveckling inom flygande taxi har dykt upp under de senaste 6 åren:
– Företaget "Hover" presenterade en apparat medlågljud elmotor och kompakta mått - som en bil. Den lyfter till en höjd av 150 m och landar på en vanlig parkeringsplats. Drönaren är designad för två passagerare, den maximala nyttolasten är 300 kg, och hastigheten är 200 km/h.
— 2016, det ryska företaget Hoversurfvisade en hoverbike som du kan bära med dig och ta av när som helst från en vanlig stadsparkering. Den når hastigheter på upp till 100 km/h, och lyfthöjden är av säkerhetsskäl tvångsbegränsad till 5 meter.
— Under 2018, utvecklad av Airbus passagerareAlpha One VTOL-flygplanet klättrade till en höjd av 5 meter och stannade i luften i 53 sekunder. Användaren kommer att kunna ringa UAV genom applikationen och ta sig från en punkt till en annan både inom staden och utanför.
— 2020 gjorde CityAirbus flygtaxiförsta gratisflyget. Testerna ägde rum i förorterna till Paris, staden Ile-de-France.CityAirbus-flygplanet kan röra sig i hastigheter upp till 120 km/h under en sträcka på upp till 30 km. Vikten på den flygande taxin är mer än 2,2 ton, CityAirbus är utrustad med tre passagerarsäten och ett förarsäte.
– 2022 introducerade den kinesiska startupen Pantuo Aviation T1, en flygande taxidemonstrator med en luftkanal. Den kommer att flyga i hastigheter över 300 km/h och har en räckvidd på 250 km.
Läs mer:
Rymdsonden flög 200 km från Merkurius. Titta vad han såg
Forskare avslöjar hur vitaminer påverkar förekomsten av cancer
Kinesisk tankeläsningshjälm slår larm när en person ser porrinnehåll