Who are robots?
A few years ago, a cool thing appeared on Reddit - scientists described complex
Robotics is a synergistic appliedfield of activity. It consists of programming, mechatronics and cybernetics. Mechatronics is something that interacts with the real world. And cybernetics is a multi-link science, which includes, first of all, the management of created programs.
What is a robot?15 years ago, many would have said that this is a robotic arm that works in a factory and does welding or painting. Another popular answer is the android robot from the movie world. But is a moving cart or an unmanned vehicle a robot? Yes, this is also one of the areas of robotics. Aircraft are also robots, some of the latest developments include intelligent technologies and are, in fact, autonomous robots.
 The mobile cart is also a robot
The mobile cart is also a robot
There is also such an area of robotics as fieldrobotics - "mobile robotics". This includes all robots that move in a field, building, or underwater. The most interesting application, in my opinion, is agriculture.
History of aircraft
The history of aircraft began in the pastcentury. Before that, only balloons without an engine flew, and it was difficult to call them robots. At the beginning of the last century, two types of aircraft functioned - airships and airplanes. The first controlled flight was made by the Wright brothers. Moreover, the first autopilot appeared quite quickly, almost 10 years after that, it helped to stabilize the flight.
The current direction of robotics is related todevelopment and availability of new open autopilots such as PixHawk (PixHawk is open hardware for controllers, drones and other UAVs. It is used for academic, amateur and professional purposes). An example of the arrival of drones in the life of every person is the delivery of pizza by the Dodo Pizza company together with Copt Express - this happened in 2014.
 History of aircraft
History of aircraft
How the drone is controlled
Modern aircraft use oneof the three principles of creating lift - aerostatic, jet or aerodynamic. The aerodynamic principle of flight and the creation of lift (throwing down part of the air) can be implemented either due to the movement of the entire apparatus, equipped with a fixed bearing surface (wing), or due to the movement of individual bearing parts of the apparatus (main rotor, fan) relative to the air.
 How devices fly
How devices fly
The drone has a propeller that creates lift.Having taken off the ground, the device starts to move the screw faster and rises up. But the force of action is equal to the force of reaction. When the propeller rotates, a moment is created in the opposite direction - this is the design of helicopters and copters. If the helicopter has one propeller, it will not be stable. Therefore, the device uses either a two-rotor scheme or a tail rotor.
The quadcopter has a very simple design -It usually has four screws, two of which rotate in one direction and two in the other direction. If the user needs to move forward, some propellers turn slower while others turn faster. And if the user wants to turn, then some screws placed diagonally accelerate, while others slow down.
 How a quadcopter flies
How a quadcopter flies
The copter's movements in the corners are related to the movement alongcoordinates. If the pilot wants to move forward, we need to first tilt the drone forward, and then, as the electric device pulls forward, stabilize it at the point where we want to stay.
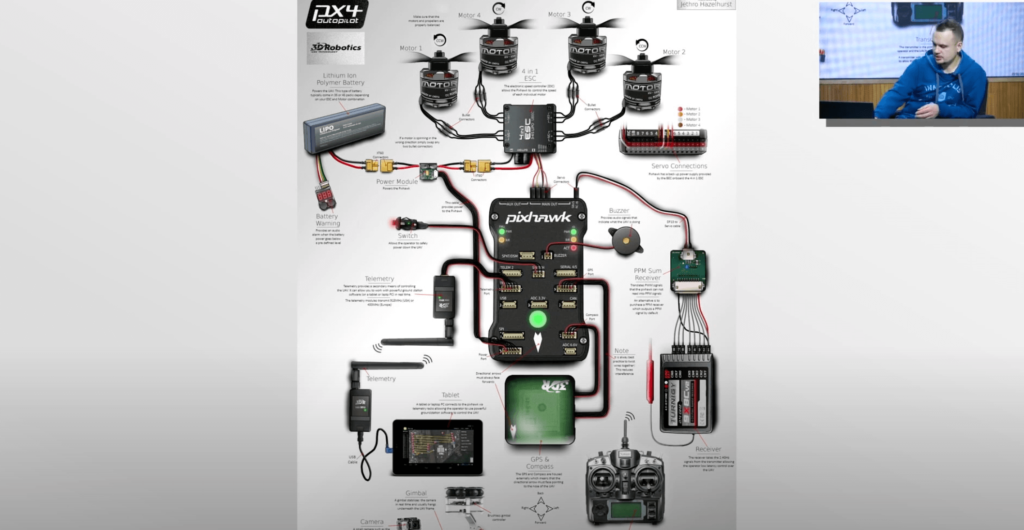
This is a diagram of one of the most popular autopilots,on the basis of which new devices can be made. It connects to all motors and sensors. Moreover, the motors have their own control unit, the ESC regulator - Electronic Speed Controller, which controls the speed of the motor.
Of the sensors, there is GPS so that the drone canwork outdoors, fly to points and stabilize position. But inside the autopilot itself there is also an IMU - an inertial sensor module that allows it to determine attitude angles. There is also a communication channel, a ground control station and a battery.
 UAV device
UAV device
As mentioned above, there is a levelengine control - we, without hesitation, can set the rotation speed. The rest of the levels work on the same principle: the next one is orientation control.
But first we need to control the rotation speed- FPV copters fly at this level (devices that allow you to watch the picture from the drone’s camera in real time from the first person (FPV - First Person View). Experienced pilots set the rotation speed and constantly steer with the joystick. The next stage is when the user can stabilize the angle, but the drone will still move.Next is speed control, and the highest is positional control, maneuvers to move to a point or move along a given trajectory.
Those who want to program, build andcontrol drones - should pay attention to the PIX4 open source autopilot. There is a whole community around aerial robotics (ROS - robotic operating system, or Open robotics), there are simulators for drones. Therefore, many experiments can be done in the simulator without having the drone itself.
Drone development stages
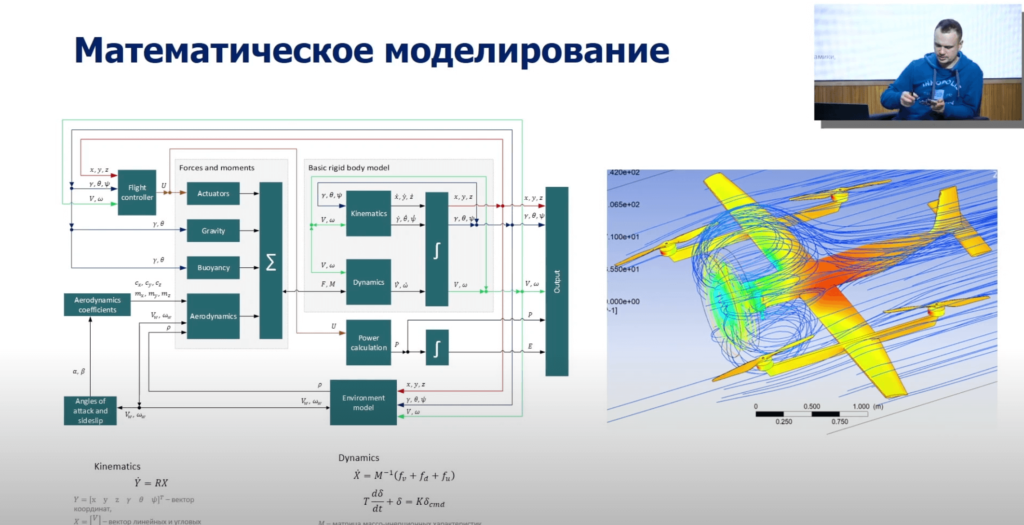
Researchers start with a conceptualmodeling, and then they need to build an accurate model of the apparatus. Without going into the formula, a copter model is essentially a rigid body model. This is Newton's second law extended to systems of particles. It has translational and rotational motion, there are kinematics and dynamics of motion, and in order to describe the model of a specific device, we must add here the equation of forces acting on a specific drone.
 How UAVs are modeled
How UAVs are modeled
The next step is to develop the systemmanagement. If we go in the classical way: first we find out the exact mathematical model and, on its basis, we already synthesize the control algorithm or new formulas. All levels can be included in the control system: motion planning, environment perception, state estimation with the help of sensors. Algorithms allow us to refine our coordinates and data.
 Drone control system
Drone control system
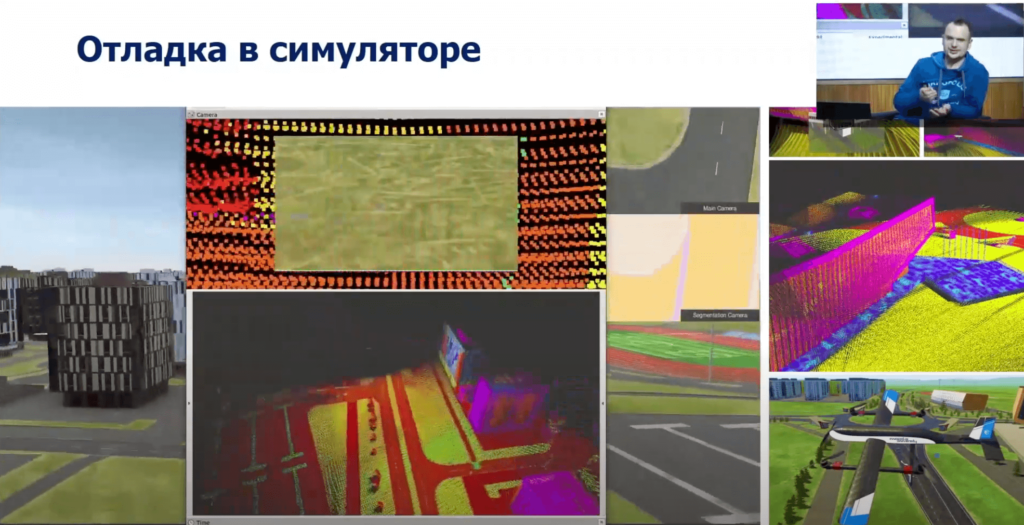
When there is a control algorithm, it can be immediatelyapply, but doing so is quite expensive. Devices crash at the slightest error - this must be taken into account and backups made. Simulators are used for testing.
Below is a virtual tour of Innopolisis a product of our university, it is available for download on GitHub. This is not only a visual component, but also the data of all sensors of the device. It has all position sensors, it is controlled like a drone and can debug all control algorithms.
 How drones learn in simulation
How drones learn in simulation
When based on experience with the simulator appearsmore confidence - you can move on to hardware implementation. Its components are shown here: the manufacture of the device from carbon and composite, the creation of electronics, the placement of engines, their fastening.
Tests do not start on the street:First, the devices are tested on a suspension or a special stand. They can be used to debug elements of the functioning of an unmanned aerial vehicle. For example, a vertical take-off and landing aircraft is shown here - this is a hybrid of a copter and an airplane; in the video you can see how it copes with external disturbances and maintains an angle. On the right is a pretty crazy experiment where you fire up five engines at once and see how the control system handles it.
 How drones are built
How drones are built
After testing, they move on to flights -small takeoffs at low speeds, controlled movement with a pilot who can take control. The final chord is a completely unmanned flight.
The device takes off vertically -“like a copter,” then its main engine turns on, the drone accelerates, switches to airplane mode, and develops sufficient speed for the wing to work. Then the contour propellers are turned off, and it flies like an airplane - the landing process is carried out in reverse order.
What's going on with drones
One of the tasks that modernscientists — bypassing obstacles in flight. Some drones already know how to do this, but the task is a little wider - you need to teach the devices to move as quickly as possible in an environment with obstacles. And there is still room to strive and improve the algorithms.
Another example of such testing is a flight toforest. There is a very interesting approach - not only new algorithms are used here, but also sensors - an event camera. This is a very high frequency camera that transmits the difference between frames in every unit of time: this allows you to quickly control and react to obstacles.
In the field of drone motion planning,competition: who will do it faster. The task is to map an unknown area, build its three-dimensional representation, find objects on it. We flew at the university, but also solved the problem of finding objects. Our results were even better than known published algorithms.
There are competitions in the race of drones.They are made on devices with a camera, when the pilot has goggles and he controls the drone to fly through the gate as quickly as possible. Quite a spectacular event, where the same task must be performed in automatic mode. Unfortunately, so far the computer has managed to defeat a person only in chess, and the drone robot has not been able to overtake a human pilot, although the progress is already quite serious. A drone with the help of a machine vision algorithm can perform such tasks, the work is only to increase speed.
Another competition is Microsoft Games ofdrones, it is carried out in a simulator. In the same area, one of the famous leading competitions in Saudi Arabia is held. Participants there are recruited for three years in advance.
Unmanned devices are used for drone shows- These are spectacular events that today have become a replacement for fireworks. But that's not the only group use - they can inspect a larger area.
Where apply
So that it does not look like exclusively scientificdevelopment, below is a demo of the Skydio drone. Now this is the most advanced device in terms of autonomy. This is an example of how modern technologies - cartography, obstacle avoidance, traffic planning are used together in a product already available to the user.
Another direction is new designsaircraft. One of them is foldable drones. One such device can fly into tight spaces for inspection after an accident. Another example is a drone that can unfold. For example, he can fly out of a narrow pneumatic tube and then fly as usual.
We also have a project in this area - this issoft Tensodrone. This is the first soft-shell drone that flies. The pleasure is that you can drop it and it will remain intact. In addition, you can change the length of the beams, the tension of the cables.
Two examples that will come to life insoon. First, delivery using drones. Now there is a very interesting implementation where we combine a parcel terminal and a drone landing station - in this case, we don’t need to worry about when the drone will arrive, where it will land, so that we can get to it on time and pick up the cargo before it is stolen. The second example is a flying taxi. This is the most exciting area of development, and there are already working prototypes. But this will happen only in the next decade.
What developments in the field of flying taxis have appeared over the past 6 years:
- The company "Hover" presented a device withlow-noise electric motor and compact dimensions - like a car. It takes off to a height of 150 m and lands in a standard parking space. The drone is designed for two passengers, the maximum payload is 300 kg, and the speed is 200 km/h.
— In 2016, the Russian company Hoversurfshowed a hoverbike that you can carry with you and take off at any time from a regular city parking space. It reaches speeds of up to 100 km / h, and the lifting height is forcibly limited to 5 meters for safety reasons.
— In 2018, developed by Airbus passengerAlpha One VTOL aircraft climbed to a height of 5 meters and stayed in the air for 53 seconds. The user will be able to call the UAV through the application and get from one point to another both within the city and beyond.
— In 2020, CityAirbus air taxi madefirst free flight. Testing took place in the suburbs of Paris, the city of Ile-de-France. The CityAirbus aircraft is capable of moving at speeds up to 120 km/h for a distance of up to 30 km. The weight of the flying taxi is more than 2.2 tons, CityAirbus is equipped with three passenger seats and one driver's seat.
- In 2022, the Chinese startup Pantuo Aviation introduced the T1, a flying taxi demonstrator with an air duct. It will fly at speeds of over 300 km/h and have a range of 250 km.
Read more:
The space probe flew 200 km from Mercury. Look what he saw
Scientists uncover how vitamins affect the incidence of cancer
Chinese mind-reading helmet sounds the alarm when a person sees porn content